Niantic Spatial VPS on Coco Delivery Robots

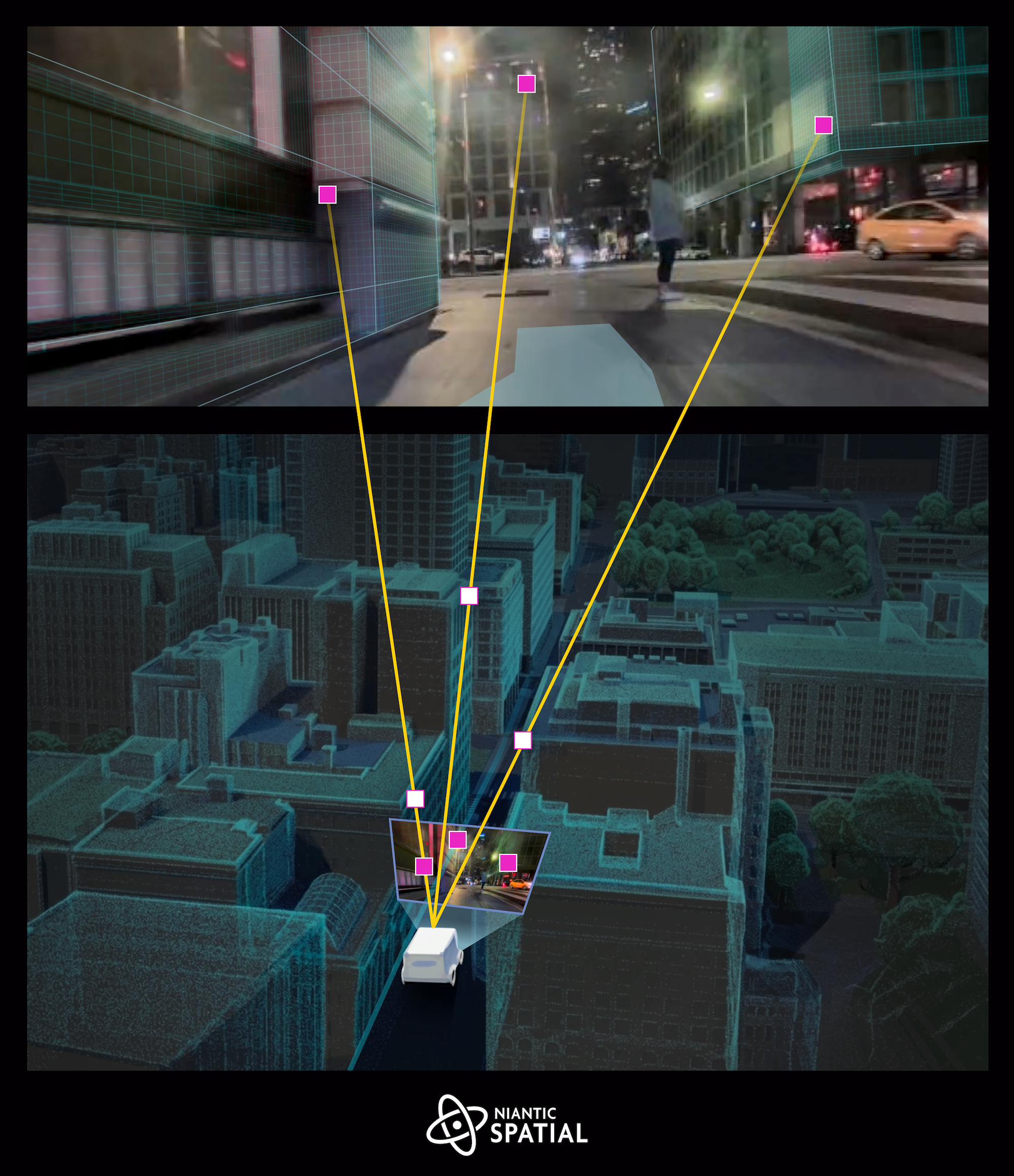
As Niantic Spatial expanded from mobile AR into physical AI and robotics, I led the effort to bring our Visual Positioning System (VPS), the cloud-based localization technology that determines a device's position and orientation with centimetre-level accuracy, onto a real autonomous robotics platform: the Coco delivery robots.
Coco's fleet of autonomous sidewalk robots is currently deployed across six markets: Los Angeles, Miami, Chicago, and Jersey City in the US, plus Helsinki and Turku in Finland, delivering for partners like Uber Eats, DoorDash, and Wolt. The latest-generation Coco 2 robots run on the NVIDIA Jetson Orin platform — a very different beast from the iOS and Android targets the spatial stack was originally built for.
My contributions covered the full path from source code to a robot localizing on a city sidewalk:
- Toolchain for the ARM Jetson target. I designed and built the cross-compilation toolchain to bring the company's core spatial C++ IP to the aarch64 Linux / NVIDIA Jetson board used by the Coco robots, extending the same hermetic, fully portable build infrastructure I had previously deployed company-wide. From any developer machine, the entire spatial stack can be cross-compiled, tested, and packaged for the Jetson target as a first-class platform alongside iOS and Android.
- Porting the core spatial IP. I executed the main porting work of the spatial/VPS core code to the Jetson board, adapting the codebase to the platform's compute and memory profile and making sure the localization pipeline behaved correctly on embedded ARM hardware rather than on a phone.
- ROS2 integration. I helped integrating the VPS localization stack with ROS2, the middleware at the heart of the Coco autonomy stack, so that centimetre-accurate VPS pose estimates could be consumed natively by the robot's navigation and planning nodes alongside the rest of its sensor suite.
- Measurable by design. I ensured every relevant metric of the spatial pipeline, localization latency, throughput, memory footprint, and on-device resource usage, was clearly defined and measurable on the target hardware. This made it possible to perform a full, data-driven optimisation pass of the spatial IP specifically for this platform, instead of relying on assumptions inherited from mobile.
This work turned a mobile-first AR localisation technology into a production component of an autonomous delivery fleet operating daily on public sidewalks across the US and Europe.